Prof. Kong Hui joined the University of Macau in 2021 and currently serves as an Associate Professor in the Department of Electromechanical Engineering and Department of Computer and Information Science of the Faculty of Science and Technology and a research member of the State Key Laboratory of Smart City Internet of Things. In 2007, he obtained a PhD degree in Electrical and Electronic Engineering from Nanyang Technological University (NTU) in Singapore. In the past, he has taught and conducted research in many countries and universities, including Nanjing University of Technology, Massachusetts Institute of Technology, Ohio State University and École normale supérieure (Paris), etc.
His research is mainly related to the sensors and perception of autonomous mobile robot and high precision sensor positioning. Prof. Kong explained that although the current global satellite positioning system (GPS) is very common but also not very accurate, it is more likely to have 10 meters positioning error or even more. To make autonomous buses turn on their own, avoid obstacles, make detours, or stay on fixed roads, GPS and other sensor high-precision positioning methods are assisted are required. People mainly rely on vision when driving, because the neural network of the human brain can process visual input to help us understand the depth and speed of surrounding objects. In order to make buses more humanely recognize road conditions and react in real time, Professor Kong is currently studying to imitate the operation of the human brain, using neural networks to process visual input, and combining visual perception systems such as lidar, millimeter-wave radar, and high precision cameras. The data allows the bus to clearly position itself. On the other hand, through the visual perception system, a huge and diverse database is collected and created, so that the bus can perform in-depth learning. It is expected that the autonomous bus will be able to perceive road sections, obstacles, and traffic lights first; the second step is to understand the road conditions and determine the location of the bus itself; finally, the bus can understand and react on its own to cope with the ever-changing traffic conditions.
Prof. Kong also shared the challenges of studying autonomous driving , ‘Although there is a huge database, the actual situations on the roads is still very complicated, and the autonomous vehicle may encounter unpredictable conditions at any time. If the vehicle faces unpredictable situations that has never shown up in the scenarios in the past, it is difficult for it to react.’ Although there are still many challenges in autonomous driving, Prof. Kong said that brain science, human-machine integration, and interconnection are the trends in the near future, as small as automatic vacuum cleaners, nursing robots, and as large as Industrial robots will be adopted in the future, and these developments are inseparable from sensor perception and high-precision positioning. Another research of Prof. Kong is autonomous exploration for search and rescue robots. At present, the autonomous navigation of all mobile robots is inseparable from high precision maps, but the drawing and updating of high precision maps requires experienced robot operators to navigate the scenes through remote control robots. Collect data internally, and then draw the map offline. Manual editing may be required in the middle, so these require high labor costs. At present, Prof. Kong and his team are working on the drawing and updating of high-precision maps through exploration robots, thereby replacing manpower and saving costs. In addition, exploration robots can also be deployed in dangerous area to replace humans in completing tasks, such as search and rescue in dangerous area or Mars exploration tasks.
In regards of choosing to teach in the University of Macau, Prof. Kong said that UM is a very international university which has many excellent staff returned from overseas with international perspectives. He is also pleased to see that some students who are determined to choose research as their careers . ‘Research is a long process and it has to be persist. I am very pleased to have these like-minded students.’ He says. In the future at UM, Prof. Kong wishes to build a better research team, cultivate more outstanding students, and create more scientific research results for the local community and the country.
孔慧教授於2021年加入澳門大學,目前擔任科技學院機電工程系、計算機與信息科學系副教授和智慧城市物聯網國家重點實驗室的研究成員。2007年他在新加坡南洋理工大學 (NTU) 電氣與電子工程獲博士學位,過去曾在多個國家及大學進行教學及研究,包括南京理工大學、麻省理工學院、俄亥俄州立大學、法國巴黎烏爾姆的高等師範學院等。
他的研究主要是有關於自動駕駛和自主移動機器人的傳感和感知以及高精定位。孔教授解釋目前全球衛星定位系統(GPS) 雖然很普遍但卻沒有很精準,更可能出現10米或以上的定位誤差。若要令自動駕駛巴士自行轉彎、避開障礙物、繞道前行或保持在固定路段上行駛,則需使用GPS及其它的傳感器高精定位方法予以輔助。人在駕駛時主要依賴視覺,因為人腦的神經網絡能夠處理視覺輸入,以協助我們了解周圍物體的深度和速度。為了令巴士更人性化地識別路況及作出實時反應,孔教授目前正研究運用神經網絡處理視覺輸入,同時結合視覺感知系統如激光雷達、毫米波雷達、高精攝像頭所收集的數據,令巴士可以清晰自己的定位。另一方面,透過視覺感知系統,收集及創建龐大多樣化的數據庫,令巴士可以進行深度學習。期望可令自動駕駛巴士先行感知路段、障礙物、交通燈; 第二步理解道路狀況,自行判定巴士自身所在位置; 最後則令巴士作出 ‘因果推理’,自行作出反應,以應對多變複雜的路況。但研究上還是要面臨不少挑戰,孔教授說:「縱使擁有龐大的數據庫,但開放道路上的實際環境仍然是非常複雜,隨時都可能遇到不可預測的狀況。若巴士面對過去從沒有面對的新場景時,很難進行‘因果推理’ 。 」雖然自動駕駛仍存在不少挑戰,但孔教授表示腦科學、人機共融、互聯互通是未來的趨勢,細小如自動吸塵器、看護機器人,大至工業機器人都將滲透未來社會,而這些發展都離不開傳感器的感知及高精定位。
但研究上還是面臨著不少挑戰,孔教授說:「縱使擁有龐大的數據庫,但開放道路上的實際環境仍然是非常複雜,隨時都可能遇到不可預測的狀況。若巴士面對過去從沒有面對的新場景時,很難進行 ‘因果推理’ 。 」雖然自動駕駛仍存在不少挑戰,但孔教授表示腦科學、人機共融、互聯互通是未來的趨勢,細小如自動吸塵器、看護機器人,大至工業機器人都將滲透未來社會,而這些發展都離不開傳感器的感知及高精定位。
孔教授另一研究方向是自主探索機器人,目前所有的移動機器人的自主導航都離不開高精地圖,但高精地圖的繪製以及更新需要有經驗的機器人操作員通過遙控機器人在要導航的場景內收集數據,然後再離線繪製地圖,中間可能還需要手動編輯,因此這些都需要很高的人力成本。目前孔教授及其團隊正在努力通過探索機器人實現高精地圖的繪製及其更新,進而取代人力,節省成本。除此之外,探索機器人還可以被部署於危險場景來代替人類完成任務,諸如危險環境中的搜救或者火星探索等任務。
提及選擇任教於澳門大學,孔教授表示澳大是一所十分國際化的大學,不少教職員都從海外回流澳門,具備國際視野。他也樂見部份學生立志以研究為目標,對此孔教授十分欣賞地說: 「做研究不能急功近利,這是一個漫長的過程,需要本著初心,堅持實踐,我十分欣慰能有這種志同道合的學生。」未來在澳大,孔教授表示希望能建立一支更優秀的研究隊伍,培養更多優秀人才,為本地乃至國家創造更多科研成就。

孔慧教授去年加入澳大
Prof. Kong Hui joined UM last year


自主探索機器人
Active Mapper
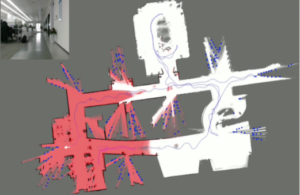
自主探索機器人在繪製地圖
Active Mapper is conducting indoor mapping
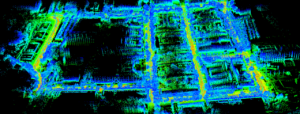
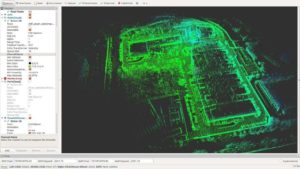
激光雷達視角的地圖
A map from the perspective of lidar