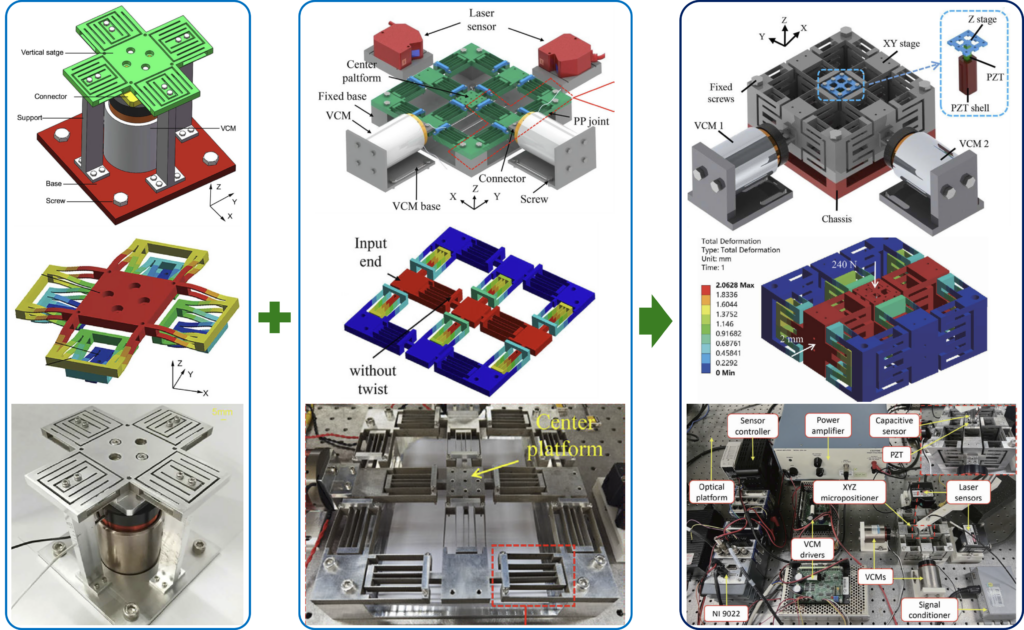
Flexure-Based XYZ Micropositioner With Active Compensation of Vertical Crosstalk for Ultrahigh Precision Micropositioning (IEEE/ASME Transactions on Mechatronics 2024, 29(5), 3762-3773; IEEE Transactions on Automation Science and Engineering 2024, 21(4), 6868-6881)
Flexible Micromanipulators
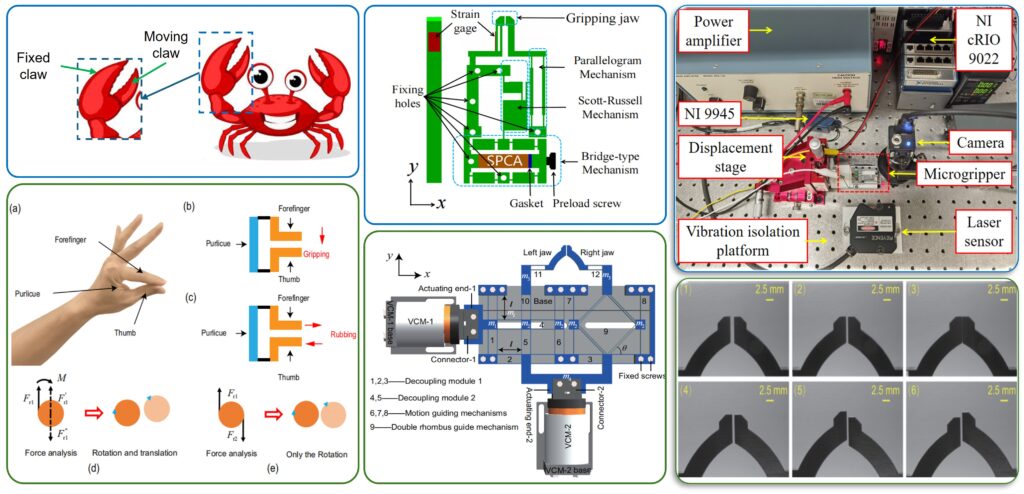
Bio-Inspired Compliant Micromanipulators with Millimeter Strokes for Micromanipulation (IEEE Transactions on Robotics 2023; Mechanism and Machine Theory 2022, 171, 104736)
Robotic Manufacturing
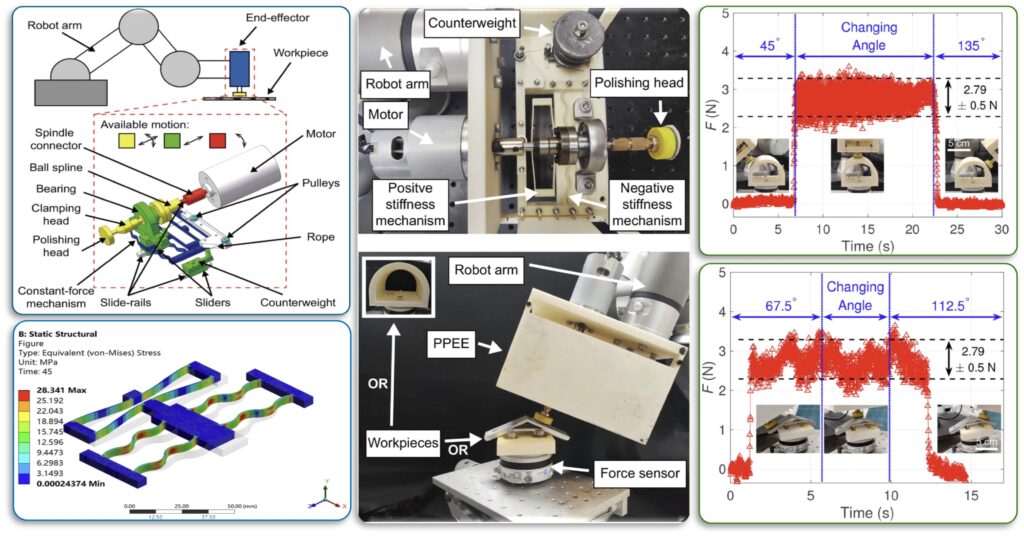
Passive Polishing Robot End-Effector With Adjustable Constant Force and Wide Operating Angle (IEEE/ASME Transactions on Mechatronics 2024, doi: 10.1109/TMECH.2024.3375516; Robotics and Computer-Integrated Manufacturing 2022)
II. Precision Service
Intelligent Disinfection Robots
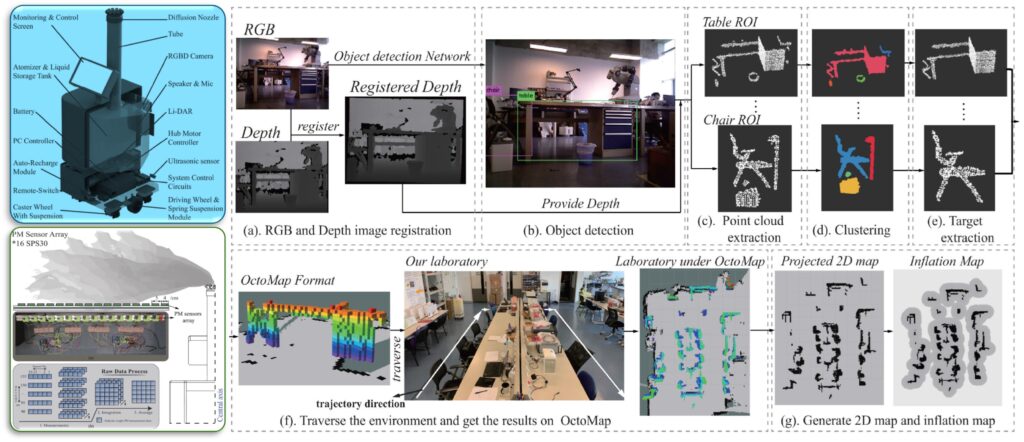
Autonomous Indoor Disinfection Robot Based on Disinfection Modeling for Total Environmental Cleaning (IEEE Transactions on Automation Science and Engineering 2023, 20(1), 649-661)
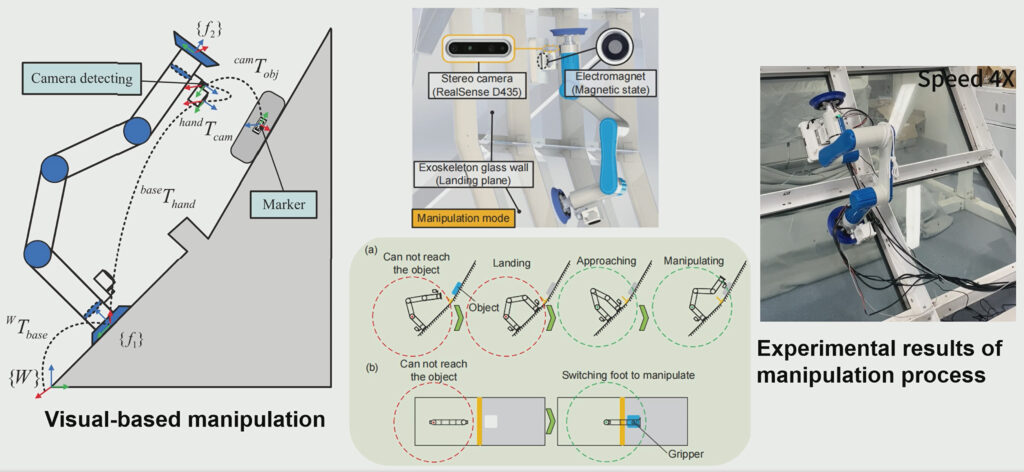
Window Cleaning Robots
Biped Robotic System for Highrise Exoskeleton-Structure Window Cleaning (IEEE Transactions on Automation Science and Engineering 2024, doi: 10.1109/TASE.2024.3390030; IEEE/ASME Transactions on Mechatronics 2023, 28(3), 1649-1661)
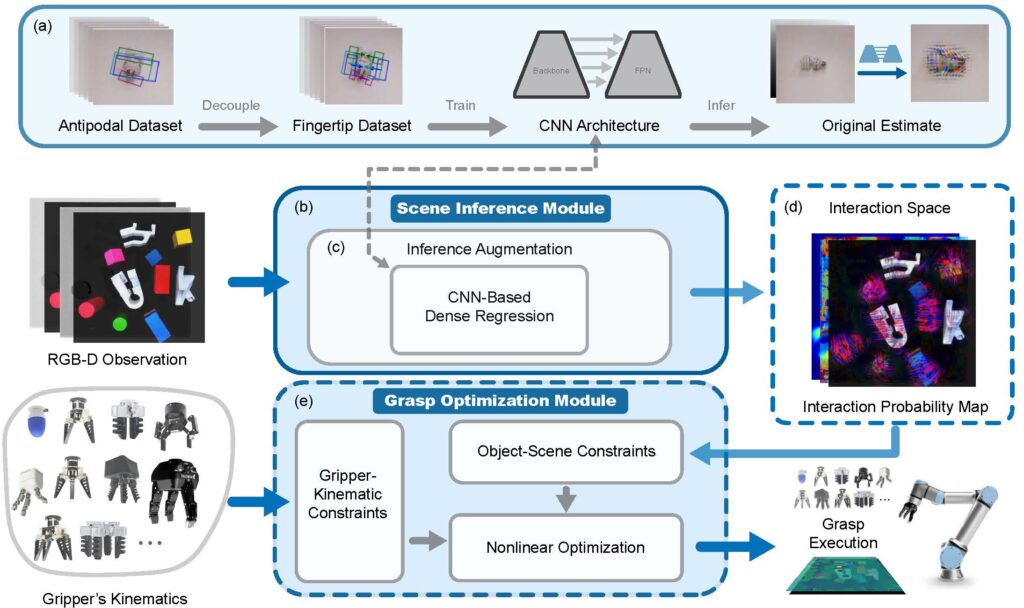
Robotic Grasping
Transferring Grasping Across Grippers: Learning-Optimization Hybrid Framework for Generalized Grasp Generation (IEEE Transactions on Robotics 2024, 40, 3388-3405)
III. Precision Healthcare
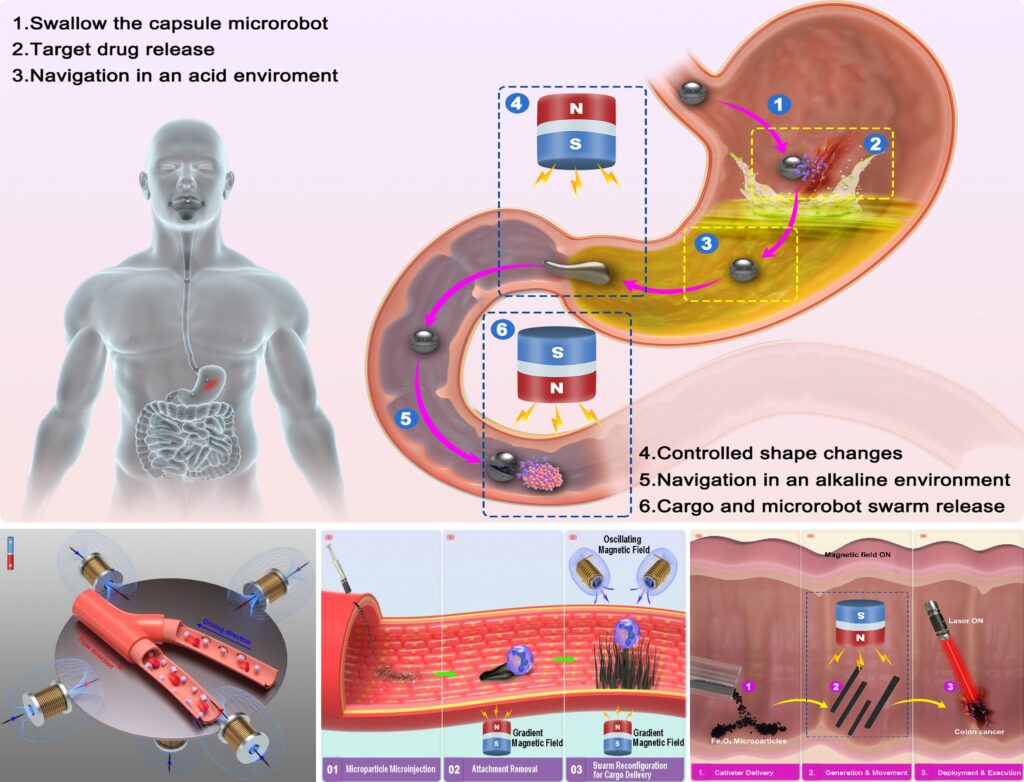
Micro/Nano Robots
Magnetic Nanoparticle Swarms Enable Efficient Microrobot Deployment and Execution for Precision Medicine (ACS Nano 2022; Advanced Intelligent Systems 2022; Cell Reports Physical Science 2023; iScience 2023)
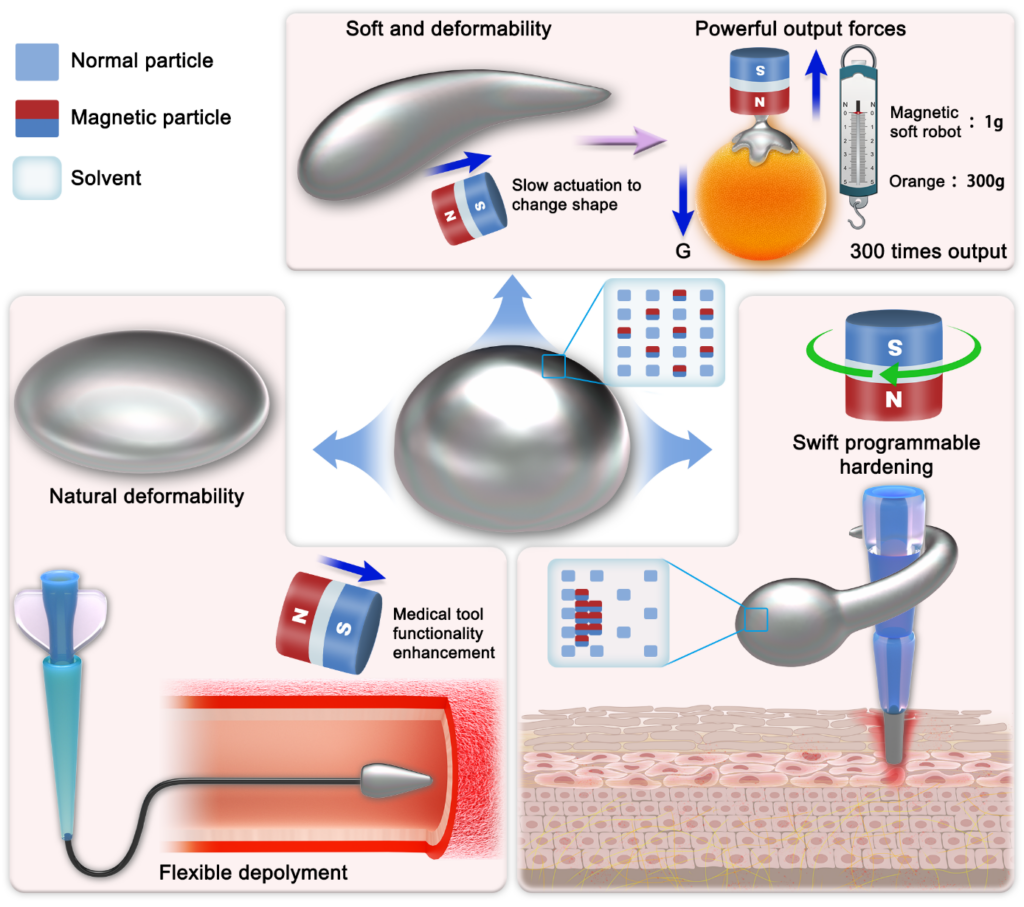
Magnetic Soft Robots
Spreadable Magnetic Soft Robots with On-demand Hardening for Precision Medical Treatment (Research 2023, 6, 0262)
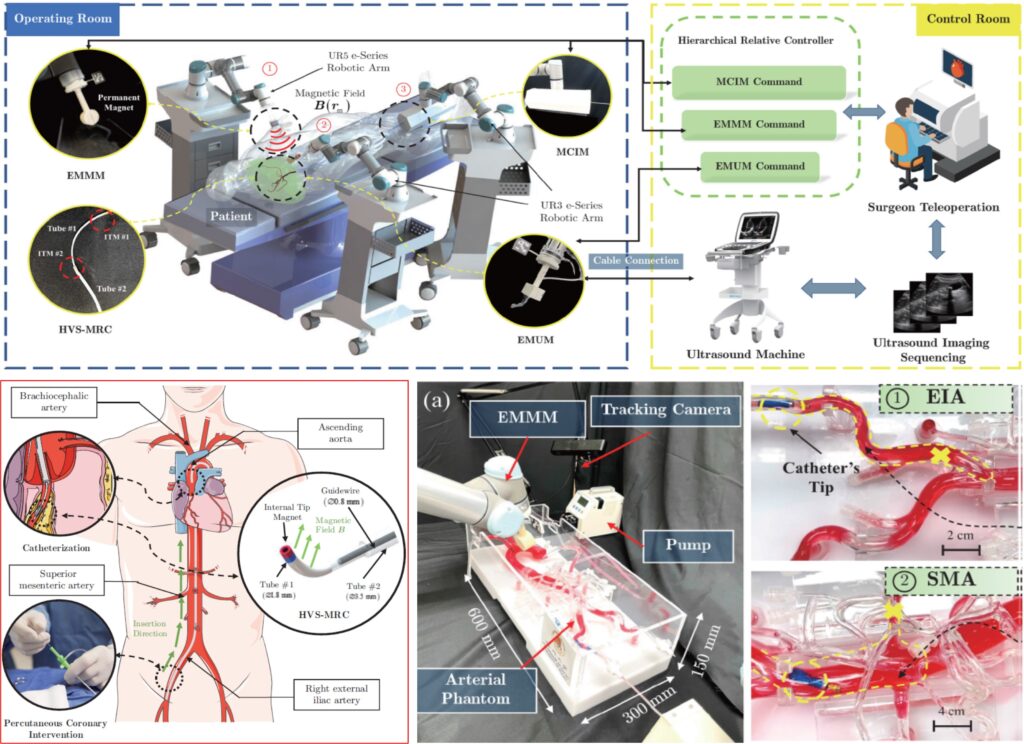
Medical Robots
Homocentric Variable-Stiffness Magnetic Catheter for Multi-Arm Robotic Ultrasound-Assisted Coronary Intervention (IEEE Transactions on Robotics 2024, 40, 2306-2326; Cyborg and Bionic Systems 2024, 5, 0188)
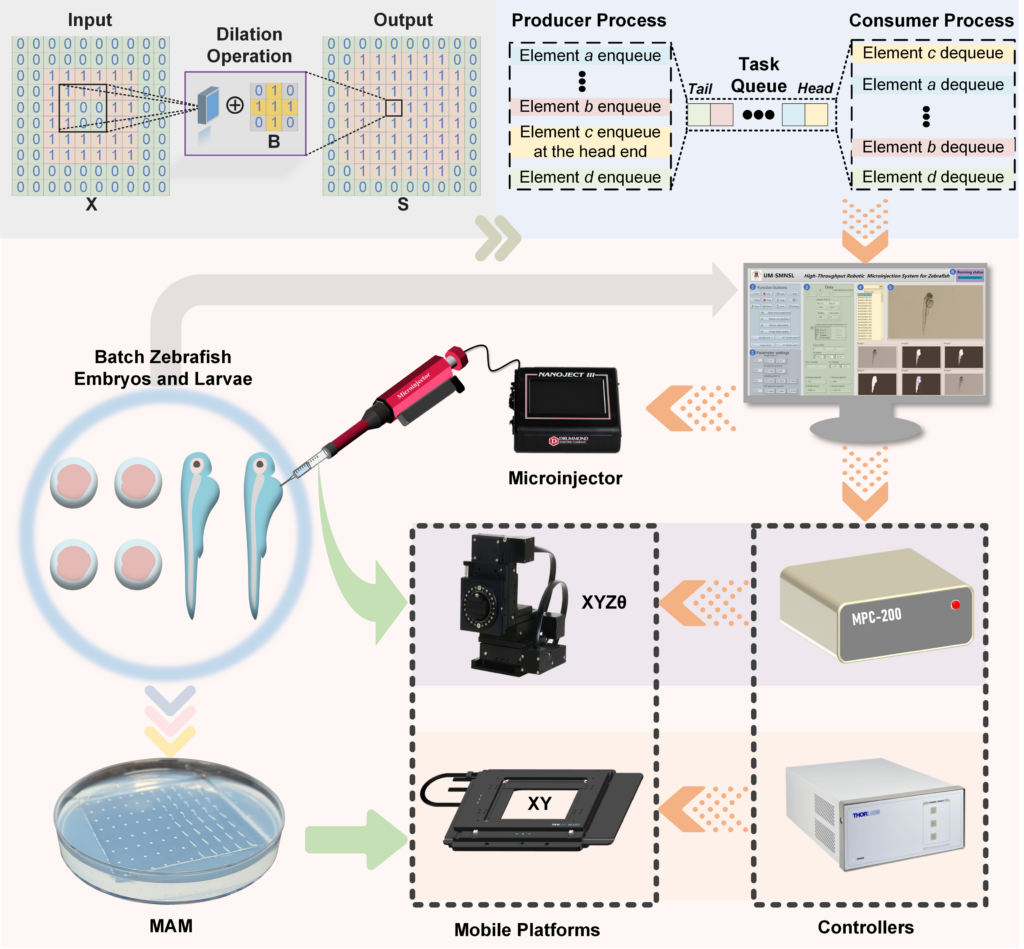
Micro/Nano-Manipulation Robots
Automated Robotic Microinjection System for Batch Injection of Zebrafish Embryos and Larvae for Disease Studies (Microsystems & Nanoengineering 2024; IEEE/ASME Transactions on Mechatronics 2023, 28(3), 1315-1325; IEEE/ASME Transactions on Mechatronics 2017, 22(4), 1744-1754)
Research Projects
Principal Investigator, “Development of Air Bubble-Inspired Multifunctional Magnetic Microrobots”, funded by Research Committee of University of Macau, 2025–2026.
Principal Investigator, “Development of Dexterous Microrobots to Assist in Minimally Invasive Gastrointestinal Surgery”, funded by Macao Science and Technology Development Fund (FDCT), 2024–2027.
Principal Investigator, “Development of Intelligent Robotic Systems for Human-Robot Collaborative Operation”, funded by Macao Science and Technology Development Fund (FDCT), Macao Funding Scheme for Key R&D Projects (澳門重點研發專項資助計劃), 2023–2026.
Principal Investigator, “Design and Development of a Magnetically Actuated Soft Catheter Robot with Variable Stiffness”, funded by Macao Science and Technology Development Fund (FDCT), 2023–2026.
Principal Investigator, “Design and Control of Force Feedback-Based High-Throughput Bio-Microinjection System”, funded by Natural Science Fund of Guangdong Province, 2023–2025.
Principal Investigator, “Development and Application of Magnetically Driven Microrobots for Targeted Therapy”, funded by Research Committee of University of Macau, 2023–2025.
Principal Investigator, “Design and Development of Haptics-Based Robotic System for Dexterous Micromanipulation of Zebrafish Larvae”, funded by Research Committee of University of Macau, 2023–2024.
Principal Investigator, “Design and Control of Micromanipulation Robotic System for High-Throughput Microinjection of Zebrafish”, funded by National Natural Science Foundation of China (NSFC) (國家自然科學基金面上項目), 2022–2025.
Principal Investigator, “Development of Robotic Intelligent Operation System Based on 3D Vision Sensing and Compliant Force Control”, funded by Macao Science and Technology Development Fund (FDCT), Macao Funding Scheme for Key R&D Projects (澳門重點研發專項資助計劃), 2020–2023.
Principal Investigator, “Development of a New Robotic System for Automated Microinjection of Zebrafish Larvae”, funded by Macao Science and Technology Development Fund (FDCT), 2020–2023.
Principal Investigator, “Development of Intelligent Robot for Anti-Epidemic Medical Healthcare (Anti-NCP epidemic)”, funded by Macao Science and Technology Development Fund (FDCT) (澳門抗疫科研專項資助), 2020.
Principal Investigator, “Design and Fabrication of Novel Flexure-Guided Multiple Degree-of-Freedom Energy Harvester”, funded by Research Committee of University of Macau, 2020–2021.
Principal Investigator, “Development of Novel Haptic Feedback-Based Robotic Micromanipulation System for Biological Cell Manipulation”, funded by Macao Science and Technology Development Fund (FDCT), 2018–2021.
Principal Investigator, “Design and Development of New Adjustable Zero-Stiffness Compliant Micropositioning System”, funded by Research Committee of University of Macau, 2018–2021.
Principal Investigator, “Design and Development of a Novel Piezoelectric Energy Harvester”, funded by Macao Science and Technology Development Fund (FDCT), 2017–2018.
Principal Investigator, “Design and Fabrication of Constant-Force Microgripper for Micromanipulation”, funded by Macao Science and Technology Development Fund (FDCT), 2016–2018.
Principal Investigator, “Design and Control of Fully Compliant 3-DOF Constant-Force Micropositioning Stage for Cell Microinjection with Minimal Damage”, funded by National Natural Science Foundation of China (NSFC) (國家自然科學基金面上項目), 2016–2019.
Principal Investigator, “Microforce Sensing and Control System and Its Application in Automated Bio-Micromanipulation”, funded by Macao Science and Technology Development Fund (FDCT), 2015–2017.
Principal Investigator, “Design and Development of Novel Rotary Precision Micropositioning Systems”, funded by Research Committee of University of Macau, 2013–2016.
Principal Investigator, “Design and Development of Large-Range Microgripper for Microassembly”, funded by Macao Science and Technology Development Fund (FDCT), 2013–2015.
Principal Investigator, “Development of Novel MEMS-Based Microgrippers for Micromanipulation”, funded by Research Committee of University of Macau, 2012–2015.
Principal Investigator, “Novel Design and Control of a Micro/Nano-Positioning System with Large Motion Range”, funded by Macao Science and Technology Development Fund (FDCT), 2011–2012.
Principal Investigator, “Precise Motion Control of a Micro/Nano-Positioning Stage with Piezoelectric Actuation”, funded by Research Committee of University of Macau, 2011.