UM PhD student wins Best Application Paper Award at IEEE International Conference on Automation Science and Engineering
Mr. Xianli Wang, a doctoral student from the Department of Electromechanical Engineering (EME), Faculty of Science and Technology (FST), University of Macau (UM), has won the Best Application Paper Award at the IEEE 19th International Conference on Automation Science and Engineering (CASE 2023), Auckland, New Zealand.
The IEEE International Conference on Automation Science and Engineering (CASE) is the flagship automation conference of the IEEE Robotics and Automation Society (RAS). CASE 2023 received an overwhelming number of over 600 papers from more than 32 countries. After rigorous evaluation and competitive presentation, five awards including the Best Application Paper Award are selected from the nominated award finalists, with less than one percent of the researchers winning these honors.
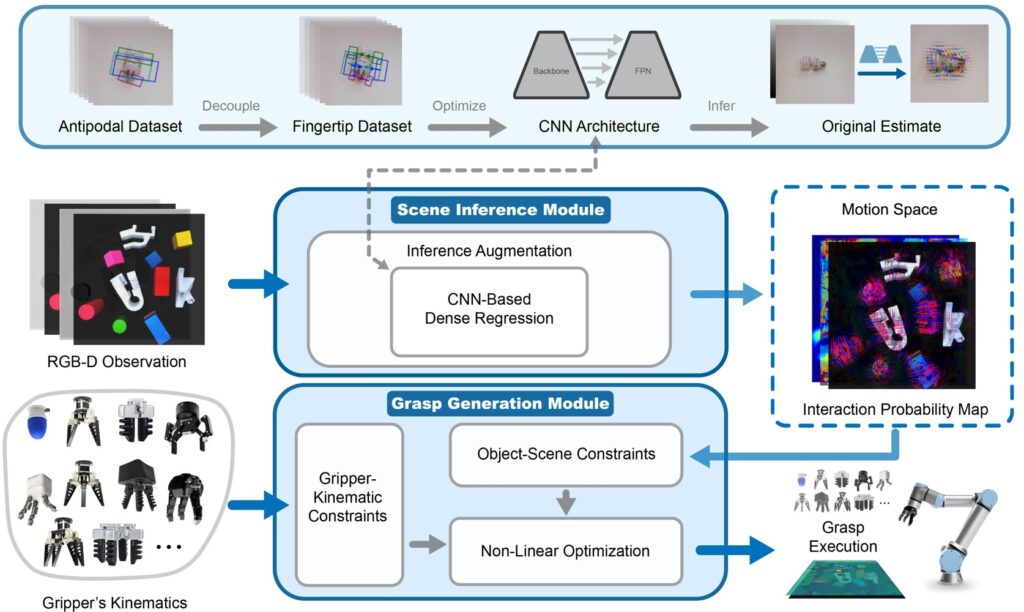
In the finalist presentation section, Mr. Xianli Wang represented the research group to present a paper titled “Improving Robotic Grasping by Using Object-Gripper Motion Space and Directional Data Ensemble Technique”. The research proposed a grasp synthesis algorithm for multiple grippers. The framework combines deep learning and nonlinear optimization with a proposed motion space model, which successfully transfers grasping knowledge from a single-gripper grasping dataset to various grippers and achieves efficient grasping synthesis for multiple robotic grippers. Its novelty and promising potential in both industrial and service applications are fully recognized by the conference’s committees and receive widespread attention from the robotics community.
This research is supervised by Prof. Qingsong Xu, Professor of Department of Electromechanical Engineering and conducted in the Smart and Micro/Nano Systems Laboratory at the University of Macau. The work is jointly sponsored by the National Natural Science Foundation of China, the Science and Technology Development Fund of Macau, the University of Macau, and the Institute for the Development and Quality, Macau. This award not only shows the profound strength of Faculty of Science and Technology in technological innovation and industrial application, but also demonstrates the outstanding contribution made by the University of Macau’s cutting-edge research in the field of automation to the upgrading of the robotics industry in Macau and even internationally.
The IEEE International Conference on Automation Science and Engineering (CASE) constitutes the primary forum for cross-industry and multidisciplinary research in automation. Its goal is to provide broad coverage and dissemination of foundational research in automation among researchers and practitioners. IEEE CASE 2023 was held in Auckland, New Zealand. The theme of the conference is “Automation for a Resilient Society”.
澳大博士生奪IEEE自動化科學與工程國際會議最佳應用論文獎
澳門大學科技學院機電工程系博士生王賢櫪日前赴新西蘭奧克蘭參加“第19屆IEEE自動化科學與工程國際會議(IEEE 19th International Conference on Automation Science and Engineering, CASE 2023)”,並奪得最佳應用論文獎。
自動化科學與工程國際會議為IEEE機器人與自動化學會(IEEE Robotics and Automation Society, RAS)自動化領域的旗艦會議。本次IEEE CASE 2023會議共收到來自32個國家超過600篇學術論文,入圍者經過嚴格的評議及現場展示競爭,最終選出包括最佳應用論文獎(Best Application Paper Award)等5個獎項,獲獎比例小於1%。
在會議現場展示中,王賢櫪同學報告論文題為《利用物體-抓手動作空間和方向數據集成技術增強機器人抓取》。該研究工作提出一個適用於多種機器人抓手的抓取位姿合成算法,該算法使用深度學習和非線性優化工具相結合的框架,創新性地提出解析動作模型並成功將單一機器人抓手的抓取數據集遷移至任意機器人抓手,最終實現可為多種抓手高效生成抓取姿態的目標。該成果的創新性及其在工業和服務業中的應用前景獲得會議評委的充分認可,並得到機器人研究者們的廣泛關註。
此研究由澳門大學機電工程系徐青松教授指導,在澳門大學智能與微納系統實驗室進行實驗,並由國家自然科學基金、澳門科學技術發展基金、澳門大學及澳門發展與質量研究所共同資助。是次殊榮不僅顯示出科技學院在科技創新和產業應用方面的深厚實力,同時也展現了澳門大學在自動化領域的前沿研究為澳門乃至國際的機器人產業升級所作的突出貢獻。
自動化科學與工程國際會議是自動化領域多學科、跨行業的主要學術交流論壇,每年舉行一次,其目標旨在為研究人員和從業人員提供及傳播自動化領域廣泛的基礎研究。IEEE CASE 2023會議在新西蘭奧克蘭舉行,本次會議的主題是「打造彈性社會的自動化」。

Xianli Wang (right) and Prof. Qingsong Xu 王賢櫪(右)和徐青松教授
Best Application Paper Award 最佳應用論文獎